A Cybot PIC based processor board
by Nigel Goodwin.
 As I've only got up to issue 4 of Cybot so far, I decided to make a small
processor board based on a PIC 16F84, it uses this chip, one 4MHz crystal, two 10pF
capacitors, a small piece of veroboard, and a connector to fit the socket on the
Cybot driver PCB - you can use the one from the test board for this. If you have
a 4MHz ceramic resonator, you could replace the crystal and capacitors with that
- I only used a crystal as I had one to hand. As I've only got up to issue 4 of Cybot so far, I decided to make a small
processor board based on a PIC 16F84, it uses this chip, one 4MHz crystal, two 10pF
capacitors, a small piece of veroboard, and a connector to fit the socket on the
Cybot driver PCB - you can use the one from the test board for this. If you have
a 4MHz ceramic resonator, you could replace the crystal and capacitors with that
- I only used a crystal as I had one to hand.
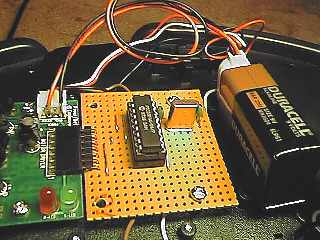 This
is a picture of the board, as I don't yet have the 9 volt battery box, I simply
soldered a PP3 connector to the power socket on the driver board. I wrote
the program in PIC assembler, the tools are freely available from the
MicroChip website for downloading at http://www.microchip.com.
As an initial test I've written a simple routine which tests the different
movements Cybot is capable of, running them all in sequence, for 1 second each,
with a 1 second pause in between. To make programming easy I've written it as a
series of subroutines, and the main program simply calls each as it's required.
The delay routine can be varied, depending on the contents on the W register
when it's called, for each 1 in the W register the routine will wait 1/10th of a
second, giving a maximum delay of 25.5 seconds - if a longer delay is needed,
simply call the routine more than once, or add a longer delay routine -
personally I thought 0.1 second accuracy with a maximum of 25.5 seconds would be
enough. This
is a picture of the board, as I don't yet have the 9 volt battery box, I simply
soldered a PP3 connector to the power socket on the driver board. I wrote
the program in PIC assembler, the tools are freely available from the
MicroChip website for downloading at http://www.microchip.com.
As an initial test I've written a simple routine which tests the different
movements Cybot is capable of, running them all in sequence, for 1 second each,
with a 1 second pause in between. To make programming easy I've written it as a
series of subroutines, and the main program simply calls each as it's required.
The delay routine can be varied, depending on the contents on the W register
when it's called, for each 1 in the W register the routine will wait 1/10th of a
second, giving a maximum delay of 25.5 seconds - if a longer delay is needed,
simply call the routine more than once, or add a longer delay routine -
personally I thought 0.1 second accuracy with a maximum of 25.5 seconds would be
enough. |
 Here is the circuit diagram for the PIC board, as you can see, it's nice and
simple. I used RB0 to RB4 to drive the motors for the simple reason that
they aligned nicely with the connector on the veroboard - one of the nice things
about using a PIC is that you can simply alter your software to make your layout
as easy as possible. I would normally add a decoupling capacitor between GND and
+5V, as close to the chip as possible, but it seems to work fine without it, so
I didn't bother. The routines only use 4 of the available pins to drive
the motors, this leaves the other 9 available as either inputs or outputs, so
this gives plenty of scope for adding sensors to Cybot. Here is the circuit diagram for the PIC board, as you can see, it's nice and
simple. I used RB0 to RB4 to drive the motors for the simple reason that
they aligned nicely with the connector on the veroboard - one of the nice things
about using a PIC is that you can simply alter your software to make your layout
as easy as possible. I would normally add a decoupling capacitor between GND and
+5V, as close to the chip as possible, but it seems to work fine without it, so
I didn't bother. The routines only use 4 of the available pins to drive
the motors, this leaves the other 9 available as either inputs or outputs, so
this gives plenty of scope for adding sensors to Cybot. |
|
I intended adding PWM speed control to my test code, but David A Oram kindly
sent me code he had modified for my board, so I've simply incorporated it into
my original test code. You can download the  original
code, and the PWM code as ZIP files. original
code, and the PWM code as ZIP files.
Here is my
original PIC source for the first test code for the board.
;Cybot test program - Nigel Goodwin Oct 2001
RHFor equ 01
LHFor equ 03
RHBak equ 00
LHBak equ 02
d1 equ 20
d2 equ 21
del equ 22
LIST p=16F84 , r=dec
include "P16F84.inc"
__config H'3FF1'
org 0000
goto start
org 0004
; Subroutines
; call 100mS delay number of times in W
Delay movwf del
DelLoop call Del100
decfsz del, f
goto DelLoop
return
; 100mS delay
Del100 movlw 0x8d
movwf d1
Delay_00
movlw 0xeb
movwf d2
Delay_01
decfsz d2, f
goto Delay_01
decfsz d1, f
goto Delay_00
;25 cycles
movlw 0x08
movwf d1
Delay_10
decfsz d1, f
goto Delay_10
;1 cycles
nop
;4 cycles (including call)
return
STOP ; stop both motors
bcf PORTB,RHBak
bcf PORTB,LHBak
bcf PORTB,RHFor
bcf PORTB,LHFor
return
FORWARD ; both motors forward
bcf PORTB,RHBak
bcf PORTB,LHBak
bsf PORTB,RHFor
bsf PORTB,LHFor
return
BACKWARD ; both motors backward
bsf PORTB,RHBak
bsf PORTB,LHBak
bcf PORTB,RHFor
bcf PORTB,LHFor
return
LEFT ; RH motor forwards
bcf PORTB,RHBak
bcf PORTB,LHBak
bsf PORTB,RHFor
bcf PORTB,LHFor
return
RIGHT ; LH motor forwards
bcf PORTB,RHBak
bcf PORTB,LHBak
bcf PORTB,RHFor
bsf PORTB,LHFor
return
SPINL ; RH motor forwards, LH motor backwards
bcf PORTB,RHBak
bsf PORTB,LHBak
bsf PORTB,RHFor
bcf PORTB,LHFor
return
SPINR ; LH motor forwards, RH motor backwards
bsf PORTB,RHBak
bcf PORTB,LHBak
bcf PORTB,RHFor
bsf PORTB,LHFor
return
; End of subroutines
; Start of main program
; Define port directions (all as outputs)
start movlw 0
; set bank 1
bsf STATUS, RP0
movwf TRISB
movwf TRISA
; set bank 0
bcf STATUS, RP0
; to call a delay, load the number of 1/10th seconds in W before the call
; the examples below all use 10 (0x0a hex) for a 1 second delay.
MAIN call STOP ;ensure all lines are turned off!.
movlw 0x0a ;set delay to 1 second
call Delay ;allow time to place Cybot down
call FORWARD
movlw 0x0a
call Delay
call STOP
movlw 0x0a
call Delay
call BACKWARD
movlw 0x0a
call Delay
call STOP
movlw 0x0a
call Delay
call RIGHT
movlw 0x0a
call Delay
call STOP
movlw 0x0a
call Delay
call LEFT
movlw 0x0a
call Delay
call STOP
movlw 0x0a
call Delay
call SPINL
movlw 0x0a
call Delay
call STOP
movlw 0x0a
call Delay
call SPINR
movlw 0x0a
call Delay
goto MAIN ;loop back to start and run for ever.
END
|
If you have any queries feel free
to contact me at nigelg@lpilsley.co.uk
or post a question on the CybotBuilder
BBS, if you build one of these boards I would like to hear from you, and
what you have programmed the board to do!.
|

